2024.10.17
脊椎内視鏡手術用刃具の開発

| 実施期間 | 2023年4月~2023年11月 |
|---|---|
| 申請企業 | 株式会社しずロボ |
| プロジェクトリーダー | 静 弘生 准教授 静岡大学 学術院工学領域 - 機械工学系列 |
| スカウト | 鈴木俊充 特任教授 静岡大学 ノベーション社会連携推進機構 産学連携推進部門 |
| ビジネス財務コーチ | 岩堀貴千 しずおか焼津信用金庫 |
インタビュー動画
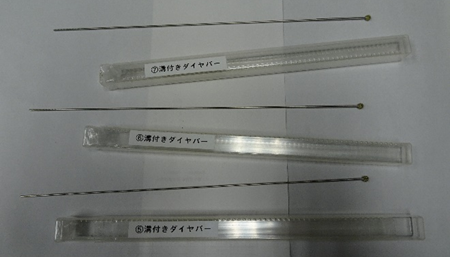
内視鏡手術用刃具に求められる良好な切削性と研削性を両立させるハイブリッド刃具を試作開発し、その最適形状を探求。外科医の手技による加工実験などを実施して、試作刃具の加工性、操作性における優位性を立証した。
課題
脊椎内視鏡手術用のドリル刃具について、研削効率の向上と安全性の確保を同時に叶えるため、医療現場ではまだないスティール製のカッティングバーと電着ダイヤモンド砥石の性能を同時に備えた刃具を開発して、骨研削能力を改善し、将来的には骨研削のロボット化を実現したい。
プロジェクト概要
内視鏡手術用刃具として、骨は削れるが神経は傷つけない二律背反の成果を求めて、球状刃具による切削とダイヤモンド砥粒による研削の双方の良さを発揮するハイブリッド刃具(刃先電着砥粒付きボールエンドミル)の試作開発を行い、刃具の最適形状を探求した。 2次元切削実験による検証、手術用シミュレータによる内視鏡装置を用いた加工特性検証などにより、今回開発したハイブリッド工具は従来の工具よりも、加工性、操作性において優れた点がある事を明らかにした。
期待される効果
神経外科用内視鏡手術シミュレータへのハイブリッド刃具の適用、ハイブリッド刃具の拡販。
内視鏡手術の手技向上と手術実績増加による患者のQOL向上。
内視鏡手術の手技向上と手術実績増加による患者のQOL向上。
関連した光技術
デジタルマイクロスコープ、ハイスピードカメラ